
EMESENT 展出於 2022 年商用無人機博覽會。

好的,這是我們的懸停地圖 St 版本,嗯,這是我們來的最新版本
以 45 度角向下傾斜的冰球,它是一個大滿貫
以 45 度角向下傾斜的冰球,它是一個大滿貫

基於激光雷達,因此它可以同時定位和映射,因此它正在旋轉和

收集 3D 環境,我們還可以使用該環境來導航飛機並

GPS 拒絕環境,因此我們在大多數飛機無法飛行的地方採礦方面做得非常好

因為他們沒有 GPS 解決方案,我們可以使用實際的激光雷達來導航飛機

我有一個例子可以告訴你我不知道它是否會很好地出現

所以在這裡我們在一個倉庫裡,我們有 GPS 拒絕的環境,我們開始懸停

我們開始旋轉它正在與我們正在飛行的 DJI m300 平台交談

我們得到了我們的解決方案並且能夠在沒有 GPS 的情況下申請,然後我們可以起飛,然後我們切換

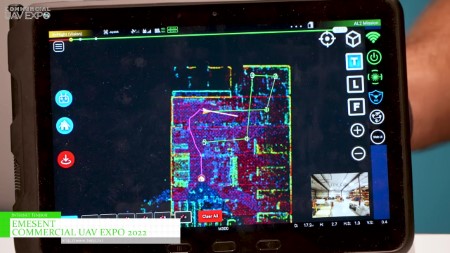
轉到我們的實時 3D 點雲,它將開始顯示正在構建的區域

所以你可以看到這是倉庫的一部分 這是一個非常稀疏的點雲它只是

足以讓您了解您所看到的以及飛往哪裡,所以現在我們可以真正進入
並為其提供航路點,我們可以通過該點雲導航並查看我們正在尋找的位置

所以我們可以給它航路點,直到飛機自主飛行到這些點,然後

同時它會繞過障礙物到達這些點,所以我們在這裡
給了它一些分數,但我們甚至可以把它放在任何地方,飛機就會熄滅
給了它一些分數,但我們甚至可以把它放在任何地方,飛機就會熄滅

它實際上會進入探索模式,所以我會在我們放置這些時快進一點

因此,一旦我們將它們放置在此視頻中,就很難在此處看到,但您會

看到一堆延長線掛在天花板上,所以
你會看到飛機繞著那個方向飛到那個點
你會看到飛機繞著那個方向飛到那個點

一旦它完成了第一個航點,然後它會去下一個

它再次使用它正在構建的環境來找到通往它的最佳路線

所以當它靠近你可以看到的這個區域時,它會繞著它跑到這些不同的點

點雲開始填寫更多,因為它有更多數據更多信息
然後它導航去尋找下一個航點

然後當它進入最後一個時,它想要去的地方會有更多的障礙

在他們周圍移動

所以它會導航回到那個時候我控制飛機把它帶回來

到著陸的位置,我們都可以自動著陸,但仍然不受操縱桿的控制

把它放下來停止我們的掃描然後我們要做的就是把它翻過來

懸停地圖在這裡得到這個,所以你可以看到它我們只是打開它並且有一個

USB 端口,您將拇指驅動器插入其中,它將開始下載您擁有的任何掃描

那裡還沒有下載,所以里面有 500 GB 的存儲空間,所以所有這些

掃描將保留在那裡,直到您將其刪除,但無論何時您要進行新的掃描,您只需

將拇指驅動器自動插入下載,然後我們轉到我們的軟件進行處理

然後關於該軟件的好處是它需要大約掃描的一倍半
處理它,因此如果您進行 10 分鐘的飛行,您可能正在查看
處理它,因此如果您進行 10 分鐘的飛行,您可能正在查看

15 分鐘處理並擁有您的完整點雲,我們可以在 Las Laz e57 uh 中導出

OBG 我相信 obj 是的,是的,所有文件格式都需要進入所有第三

派對軟件,然後從那時起,我們將其清理乾淨,然後將其發送給客戶













